A HYBRID OF REALITY AND SIMULATION
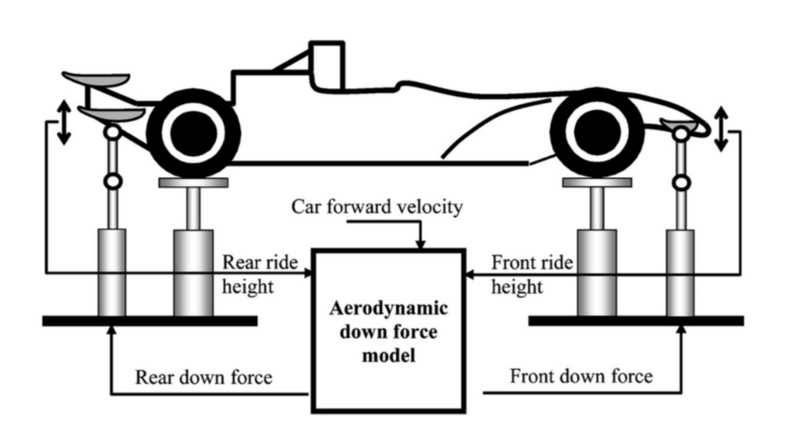
Model-in-the-Loop (MIL) Testing, which can also be called Hardware-in-the-Loop (HIL) Simulation, Real-Time Hybrid Testing (RTHT), is a method in which the test object is split into a physical part and a simulated part, and these are connected with interfaces to form a combined physical-numerical system. It is introduced to combine the advantages of physical test and computer simulation: the part of the system which is difficult to implement physically can be put into the numerical subsystem to reduce the cost and complexity of the physical test, and the key components with unknown characteristics or with some characteristics which are difficult to model can form the physical subsystem. The simulated part also provides the flexibility to change the parameters during the test.
MIL Testing can be typically utilized, but not limited to vehicle vibration test and wave energy convertor test.
The challenges of successfully generating a MIL test is: Firstly, the actuators (Hydraulic actuators or Robot arms) used to recreate the simulated motion usually have some lags or delays, especially in the high frequency domain. The characteristics of the actuators will greatly affect the accuracy of the testing results. And Secondly, the sensors for measuring the physical motion and feedback the information to the simulated subsystem will introduce significant high frequency noise to the closed-loop system, and the high frequency noise may be amplified in the loop, which in the end could make the test unstable and lose control.
GemDT possesses in-house technology of the method of generating a MIL test from the whole test object, and designing the digital controller and compensator for the MIL test system to compensate for the lags of the actuators and the measurement noise.